| |
|
Bewegungs- und Richtungserkennung mit einem zweikanaligen Radar-Sensor
- Ein Versuchsaufbau, der interessante Ergebnisse liefert -
(![]() English Version: Motion and Direction Detection with a Dual Channel Radar Sensor)
English Version: Motion and Direction Detection with a Dual Channel Radar Sensor)
| |
|
Bewegungs- und Richtungserkennung mit einem zweikanaligen Radar-Sensor
- Ein Versuchsaufbau, der interessante Ergebnisse liefert -
(![]() English Version: Motion and Direction Detection with a Dual Channel Radar Sensor)
English Version: Motion and Direction Detection with a Dual Channel Radar Sensor)
Es war die reine Neugier, die mich veranlasste so einen Rader-Sensor zu kaufen und mal zu sehen, was sich damit erreichen lässt. Ein anderes Ziel, als die Neugier zu befriedigen, gab es nicht. Aber die Versuchsergebnisse waren so interessant, dass zumindest dieser Artikel daraus entstand.
Es gab in einem Forum die Frage nach einer Technologie zur Kontrolle, ob eine bettlägerige Person noch Lebenzeichen zeigt. Ich denke, dass der Einsatz von solchen Radar-Sensoren in verschiedenen Aspekten ziemlich ideal dafür geeignet sein.
Es werden bei der einschlägigen chinesischen Handelsplattform viele verschiedene Radar-Sensoren angeboten. Mich interessierten die einfachen mit analogen Ausgängen, denn ich wollte meine Versuche auf einem Steckbrett und nicht in Firmware machen. Sie werden mit 5 V versorgt.
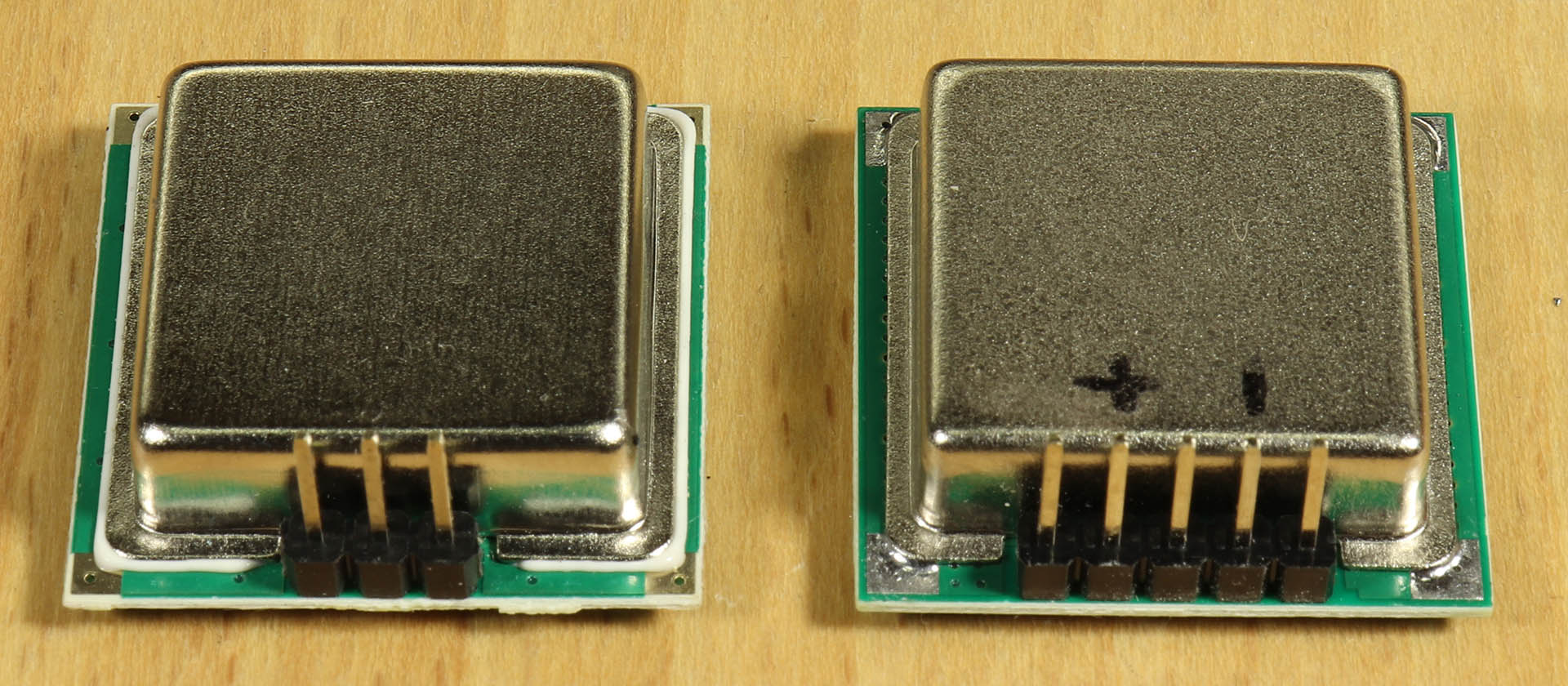
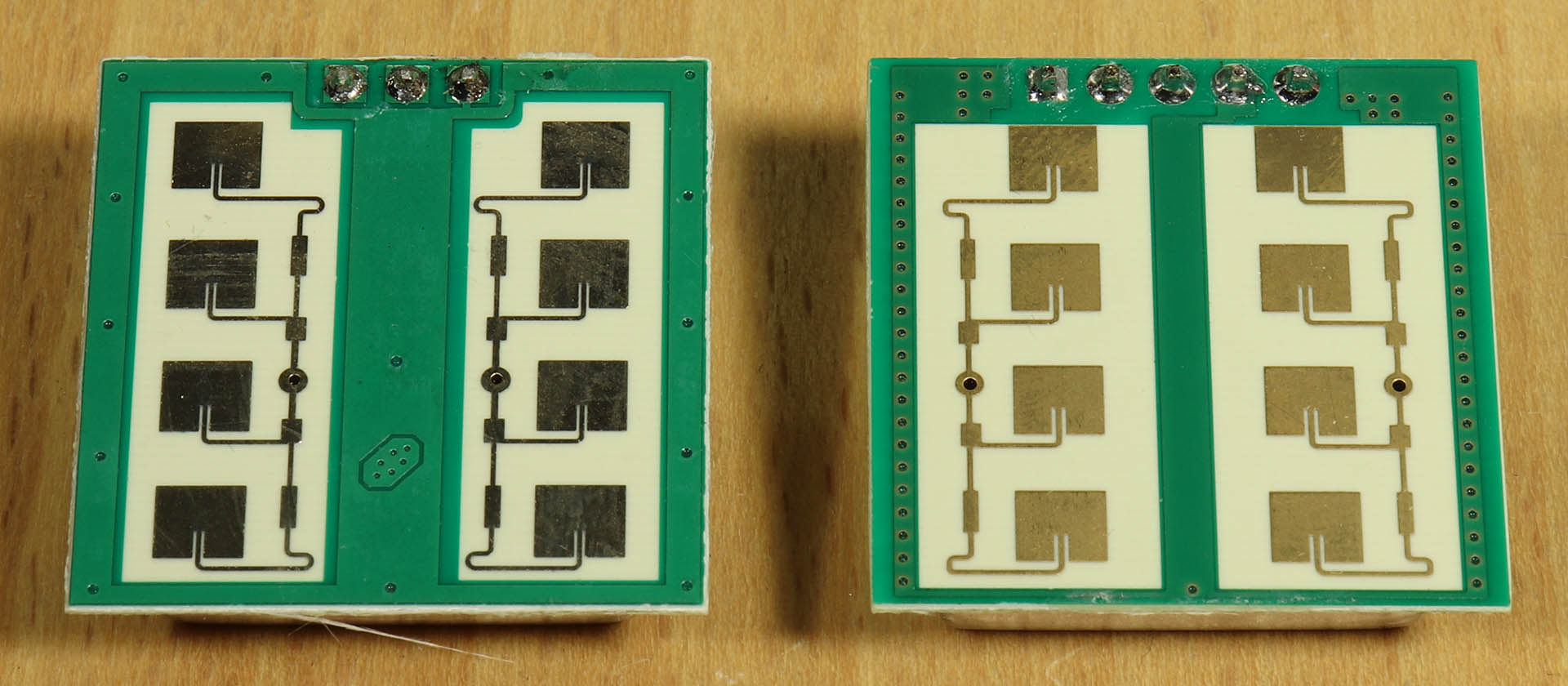
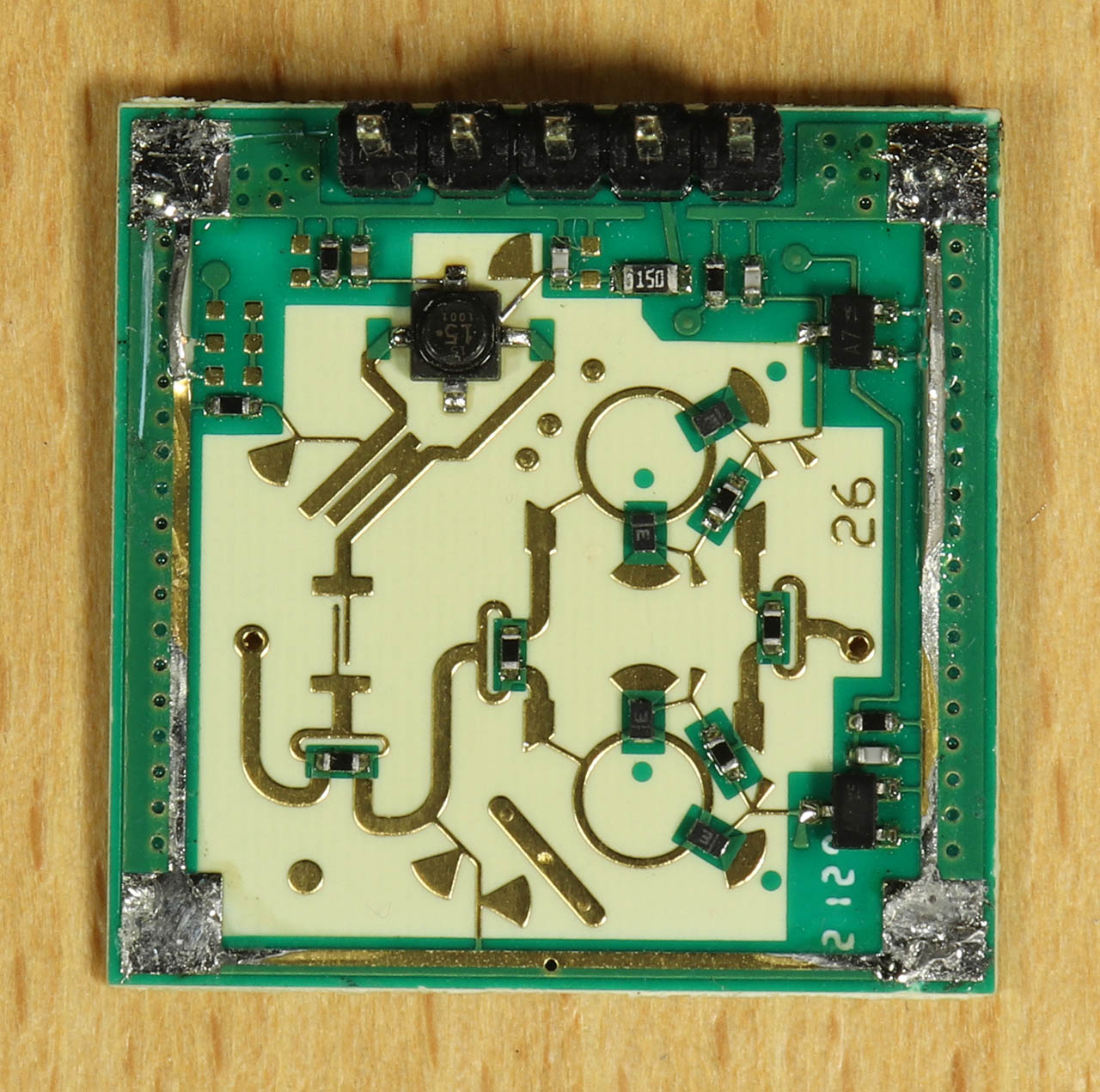
Es gibt einkanalige (3-polig) und zweikanalige (5-polig, nur 4 angeschlossen) Sensoren. 3. Bild: Der zweikanalige Sensor innen.
 Der einkanalige Sensor
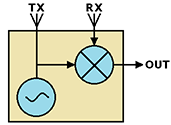
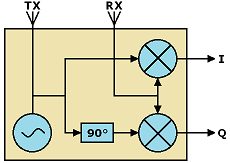
Der einkanalige SensorPrinzipiell wird bei allen (oder zumindest sehr vielen) dieser Sensoren ein HF-Träger mit ~24 GHz gesendet. Das reflektierte Signal wird mit einer zweiten Antennenanordnung empfangen und durch Multiplikation mit dem Träger demoduliert und als Analogsignal ausgegeben. Dieses Analogsignal kann sowohl positiv als auch negativ als auch sehr klein sein und muss entsprechend verstärkt werden.
Diese Art Sensor ist für wenige Euro zu bekommen.
 Der zweikanalige Sensor
Der zweikanalige SensorAußer den einfachen einkanaligen Sensoren gibt es die zweikanaligen. Bei denen wird das empfangene Signal nicht nur mit dem Träger direkt, sonders auch mit dem um 90° phasenverschobenen Träger demoduliert und als zweites Analogsignal ausgegeben. Dadurch sind die beiden Ausgangssignale bei Bewegungen ebenfalls um 90° phasenversetzt, und zwar so, dass bei Annäherung des Objekts die eine Phase, bei Entfernung des Objekts die andere Phase 90° vor- bzw. nachläuft.
Die beiden Ausgänge bzw. Ausgangssignale werden üblicherweise I und Q genannt.
Insbesondere die Möglichkeiten, die sich mit dem zweikanaligen Sensor bieten, hatten mich interessiert. Allerdings kostet so ein Sensor das Vielfache eines einkanaligen Sensors. Und zu allem Überfluss hatte ich mir einen Sensor durch Unvorsichtigkeit zerstört, so dass es mich gleich doppelt so viel gekostet hat. Aber dafür kann ich auch eine Innenaufnahme des defekten Sensors bieten.
Achtung: Zumindest bei den zweikanaligen Sensoren AM182, die ich habe, gibt es zwei verschiedene Anschlussbelegungen! AM182-I und AM182-R werden sie genannt. Welchen ich bekommen hatte, konnte ich nur mit einer Messung herausfinden, welcher Pin die Masse ist. Ich habe Version AM182-R.
Die technischen Daten sind nicht bei allen, aber bei bei einigen Angeboten zu finden.
Die Wellenlänge von 24 GHz ist ca. 12,5 mm, so dass es bei Abstandsänderungen theoretisch alle 6,25 mm zu einem kompletten Zyklus mit Maximum und Minimum kommen müsste. Bewegt sich z. B. ein Fußgänger mit 3,6 km/h = 1 m/s zum Sensor hin, würde es innerhalb einer Sekunde 160 Zyklen geben. Es würde also im Idealfall ein Sinussignal mit einer Frequenz von 160 Hz entstehen.
Aber in der Praxis ist es etwas mehr, weil das Objekt eine eine erhebliche Ausdehnung hat. Reflektionen kommen auf unterschiedlich langen Wegen, die unterschiedliche relative Geschwindigkeiten ergeben, zum Sensor. Und darüber hinaus, verstärken und verringern sich die überlagernden Teilreflektionen, so dass das Signal letzendlich deutlich vom Ideal abweicht.
Die Ausgangsimpedanz ist mit einigen 10 Ω relativ gering. Die Ausgangsspannungen bewegen sich um 0 V herum und sind nicht DC-frei. Das bedeutet: Abhängig vom Abstand des Objekts kommen also durchaus auch dauerhaft negative Spannungen aus den Ausgängen. Die können mehr als ±100 mV bei Objekten direkt am Sensor sein. Das Eigenrauschen liegt bei ca. 10 µVss (500 Hz bandbegrenzt gemessen), allerdings gibt es kaum eine Situation, in der nicht Veränderungen in der Umgebung bereits höhere Signale erzeugen.
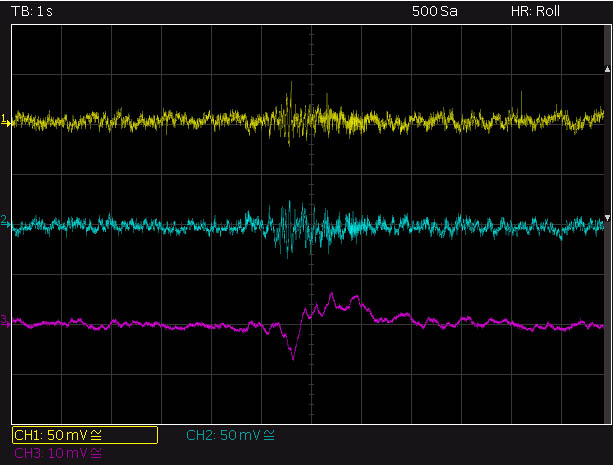
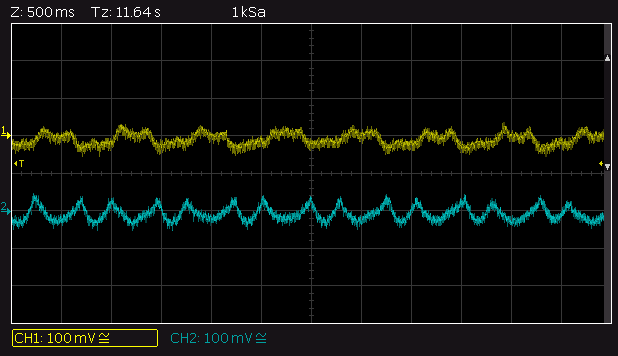 Beispiel, Screenshot rechts (Verstärkung 60 dB, 500 Hz Bandbreite): Wenn ich in 2 m Entfernung vor dem Sensor so still wie möglich sitze und die Luft anhalte, ist mein Herzschlag mit bis zu 100 µVss in diesem Screenshot deutlich zu erkennen. Allerdings ist es nicht immer so deutlich zu erkennen, denn die Bewegung ist minimal, und wenn die reflektierte und demodulierte Phase zufällig in einem Maximum oder Minimum liegt, gibt es, zumindest auf einem Kanal, praktisch kein Signal. Dafür sollte es aber auf dem anderen Kanal im 0-Durchgang optimal sein, allerdings ist das auch nicht garantiert so.
Beispiel, Screenshot rechts (Verstärkung 60 dB, 500 Hz Bandbreite): Wenn ich in 2 m Entfernung vor dem Sensor so still wie möglich sitze und die Luft anhalte, ist mein Herzschlag mit bis zu 100 µVss in diesem Screenshot deutlich zu erkennen. Allerdings ist es nicht immer so deutlich zu erkennen, denn die Bewegung ist minimal, und wenn die reflektierte und demodulierte Phase zufällig in einem Maximum oder Minimum liegt, gibt es, zumindest auf einem Kanal, praktisch kein Signal. Dafür sollte es aber auf dem anderen Kanal im 0-Durchgang optimal sein, allerdings ist das auch nicht garantiert so.
24 GHz durchdringen nicht viele Materialien. Ich habe weder genaue Untersuchungen angestellt, noch nach Informationen dazu gesucht. Aber zumindest einige wenige Erfahrung gesammelt. Kunststoffe wie ABS, PS, und PMMA (Acrylglas) und dicke Pappen dämpfen fast gar nicht, während eine einfache Glasscheibe geschätzt 50% dämpft. Durch meine 3-fach verglaste Fensterscheibe geht fast(?) gar nichts hindurch, aber durch deren Kunsstoffrahmen, der offensichtlich auch dämpft, kann ich in 5 m Entfernung vorbeifahrende PKW deutlich erkennen, aber nicht bzw. bestenfalls nur andeutungsweise Personen oder z. B. Fahrradfahrer. Auch durch meine hölzerne Zimmertür dringt nur wenig durch. Mauerwerk schirmt komplett ab.
Natürlich müssen die Ausgangssignale für jede Art Auswertung zunächst erheblich verstärkt werden. Ich habe zweistufige Verstärkung je ca. 30 dB mit Bandbegrenzung in jeder Stufe bei 500 Hz gewählt. Damit wird der Verstärker auch bei in der Praxis vorkommenden, verhältnismäßig starken Signalen (also nahen Objekten), nicht übersteuert. Bei einem einkanaligen Sensor würde jetzt mit einer analogen Schaltung oder einem µC das AC-Signal aus dem Verstärker gleichgerichtet und als Bewegung angezeigt.
Bei einem zweikanaligen Sensor lässt sich noch zusätzlich die Richtung der Bewegung erkennen, indem die Phase der I/Q-Signale verglichen wird. Je nach dem, welche der beiden Phasen vor- bzw. nachläuft, wird dann Annähern oder Entfernen angezeigt. Auch das ließe sich sehr gut mit einem µC realisieren, insbesondere dann, wenn noch weitere Auswertungen des Signals erfolgen sollen. Ich hatte aber den Vorverstärker schon auf dem Steckbrett, und ein Versuch zur Richtungsauswertung auf dem Steckbrett, war auch deshalb, zumindest für mich, viel einfacher. Er ließ sich darüber hinaus auch mit dem Oszilloskop besser beobachten, so dass ich letztendlich bei der analogen Lösung geblieben bin.
Ich möchte vorab erwähnen, dass ich nach den ersten Versuchen auf dem Steckbrett wenig Hoffnung hatte, dass die Richtungserkennung zuverlässig funktionieren könnte, weil die Signale aus den I/Q-Ausgängen in der Praxis nicht annähernd so ideal aussehen, wie man es vielleicht erwarten würde. Ich war allerdings angenehm überrascht, wie gut und zuverlässig es dann doch auf dem endgültigen Aufbau funktioniert hat.
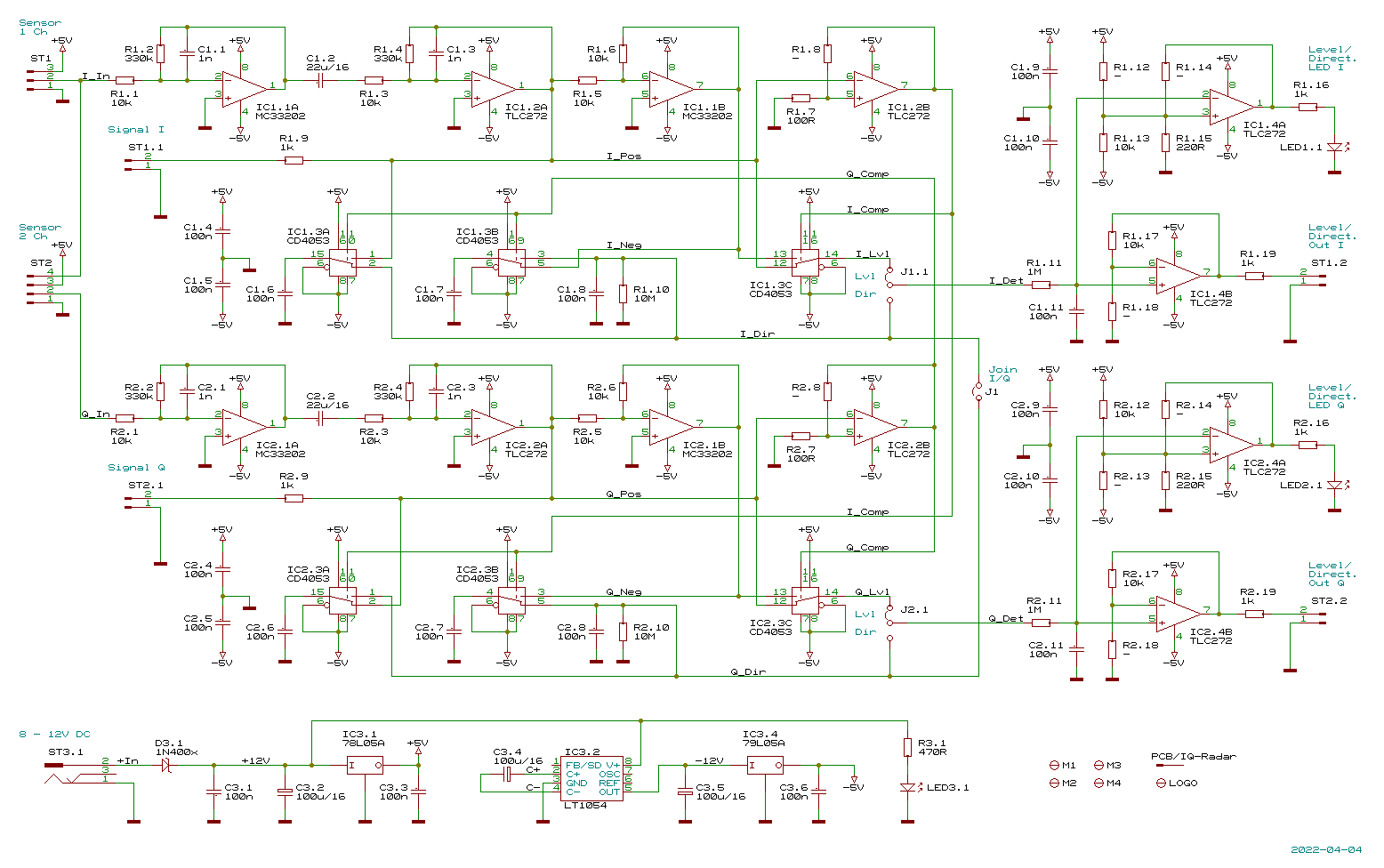 Für jeden Kanal gibt es einen 2-stufigen Vorverstärker (Kanal 1: IC1.1A und IC1.2A). Die zweite Stufe ist AC-gekoppelt und mit einem J-FET-Op-Amp ausgestattet, damit deren Ausgangsspannung keinen größeren DC-Offset führt, als der, den die TLC272 selber hat. Das ist für die folgende Auswertung wichtig.
Für jeden Kanal gibt es einen 2-stufigen Vorverstärker (Kanal 1: IC1.1A und IC1.2A). Die zweite Stufe ist AC-gekoppelt und mit einem J-FET-Op-Amp ausgestattet, damit deren Ausgangsspannung keinen größeren DC-Offset führt, als der, den die TLC272 selber hat. Das ist für die folgende Auswertung wichtig.
Richtungserkennung
Die verstärkten I- und Q-Signale werden für die Richtungserkennung auch invertiert benötigt (IC1.1B), ebenso wie eine Erkennung für den 0-Durchgang des Signals mit einem Komparator (IC1.2B). IC1.2A muss, wie gesagt, ein J-FET-Op-Amp sein, und IC1.2B muss als Komparator arbeiten können, also große Differenz-Eingangsspannungen vertragen. Das können die meisten Op-Amps nicht, aber beim TLC272 ist das der Fall. IC1.1 ist unkritischer, lediglich die Rail-to-Rail I/O-Eigenschaft und das geringere Rauschen bei tiefen Frequenzen des MC33202 ist willkommen.
Zur Richtungserkennung müsste prinzipiell das eine Signal (z. B. I) mit dem um 90° verschobenen Signal des anderen Kanals (z. B. Q) multipliziert werde. Nur geht das in der Praxis nicht, denn es lassen sich nur feste Frequenzen definiert in der Phase drehen. Hier liegen aber sehr breitbandige Signale vor, von unter 1 Hz bis ggf. mehrere 100 Hz. So geht es also nicht.
Track-and-Hold, Sample-and-Hold
Zur Lösung der Aufgabe wird im Moment des 0-Durchgangs des einen Signals (z. B. I) bestimmt, welche Spannung das andere Signal (z. B. Q) in demselben Moment hat. Je nach Bewegungsrichtung ist sie positiv oder negativ. Die Höhe der Spannung hängt natürlich von der Größe und der Entfernung des Objekts ab. Die Bestimmung der Spannung des einen Kanals im Moment des 0-Durchgangs des anderen Kanals habe ich mit einer (bzw. mit 4) Track-and-Hold-Schaltung(en) realisiert.
Beispiel: Die Spannung am Kondensator C2.6 folgt so lange dem Signal Q_Pos, wie das Schaltsignal I_Comp low ist, also während das Signal I_Pos positiv ist ("tracken"). Wechselt Signal I_pos die Polarität, was im Idealfall beim Maximum des Signals Q_Pos der Fall ist, gibt es einen Ladungsausgleich zwischen C2.6 und C2.8 (Signal Q_Dir). Diese Spannung kann dabei steigen oder fallen. Beides zusammen ergibt eine Art Sample-and-Hold-Schaltung.
Natürlich wird auch die andere Halbwelle des Signals Q berücksichtigt. Dazu wird das Signal Q_Neg mit C2.7 und IC2.3 "getracked" und dessen Ladung bei der anderen Phase von Signal I bzw. I_Comp in C2.8 (Signal Q_Dir) übertragen bzw. mit ihr vereint.. Weil Q_Neg getracked wird, hat es in diesem Moment die gleiche Polarität wie vorher die von Q_Pos.
Und natürlich wird nicht nur mit der Phase des Kanals I die Spannung des Kanals Q gesampled, sondern auch umgekehrt. Würde das nicht noch einmal invertiert geschehen, wäre das Signal Q_Dir invers zu I_Dir. Die nochmalige Invertierung ergibt sich aus der Vertauschung der Multiplexer-Anschlüsse 1/2 und 3/5 Am IC2.3. So können jetzt die Signale Q_Dir und I_Dir miteinander verbunden werden (Steckbrücke Join I/Q) und ergeben ein gemeinsames Signal, das qualitativ besser als jedes einzelne Signal sein sollte.
Vielleicht ist es auch als Tabelle übersichtlich. Die Reihenfolge der Ereignisse in dieser Tabelle würde der einen Bewegungsrichtung entsprechen, die umgekehrte Reihenfolge der anderen Bewegungsrichtung:
|
Für die Multiplexer wären statt CD4053 prinzipiell auch 74HC4053 geeignet, aber mit den höheren Innenwiderständen der CD4053 wollte ich die Spitzenströme verringern. Die dadurch entstehenden Zeitkonstanten von ca. 15 µs bleiben jedoch vollkommen ausreichend klein.
Erkennung der Signalstärke
Bei einkanaligen Sensoren kann bzw. muss man sich natürlich für eine einfache Bewegungserkennung auf die Auswertung der Signalamplitude beschränken. Weil noch ein Multiplexer frei war, eine Polaritätserkennung mittels Komparator und eine invertierung des Sensor-Signals schon vorhanden war, wird der Multiplexer IC1.3 zur Gleichrichtung des Sensor-Signals verwendet. Der Signalpegel ("Level") wird dann im Tiefpass R1.11 / C1.11 gebildet.
Zwei voneinander unabhängige, einkanalige Sensoren können angeschlossen und ausgewertet werden.
Ausgabe und Signalisierung
Mit den Steckbrücken Lvl/Dir wird Signalpegel- oder Richtungsanzeige gewählt. IC1.4 könnte die Signale auch verstärken, aber es ist wohl besser, es bei einem 1:1-Buffer zu lassen. IC1.4A kann als Komparator mit Hysterese (= Schmitt-Trigger) oder ohne Hysterese, sowie mit verschiedenen Schaltschwellen beschaltet werden. Auf die Hysterese habe ich verzichtet. Die Schwellen für die Richtungserkennung habe ich bei ca. -100 mV (Annäherung) bzw. +100 mV (Enfernung) gewählt. Bei letzterem Komparator, der bei Spannungen von > 100 mV die LED leuchten lassen soll, aber invertiert arbeitet, muss die LED verpolt bestückt werden(!)
Durch die Versuche auf dem Steckbrett hatte ich schon eine ganze Menge Erfahrungen gesammelt, aber bei einer Reihe von Details war ich mir noch nicht sicher. Insbesondere galt das für die endgültige Dimensionierung. Deswegen habe ich mich für eine Leiterplatte mit THT-Bauelementen entschieden, bei der ich alle Bauelemente (außer Stromversorgung) steckbar machen konnte. Letztendlich haben sich nicht viele der ursprünglich vorgesehenen Dimensionierungen geändert, aber eine Reihe von vorgesehen Widerständen erwiesen sich als überflüssig. Aber ausgerechnet die einzigen fest eingelöteten Bauteile, die Elkos C1.2 und C2.2, musste ich gegen bipolare tauschen.
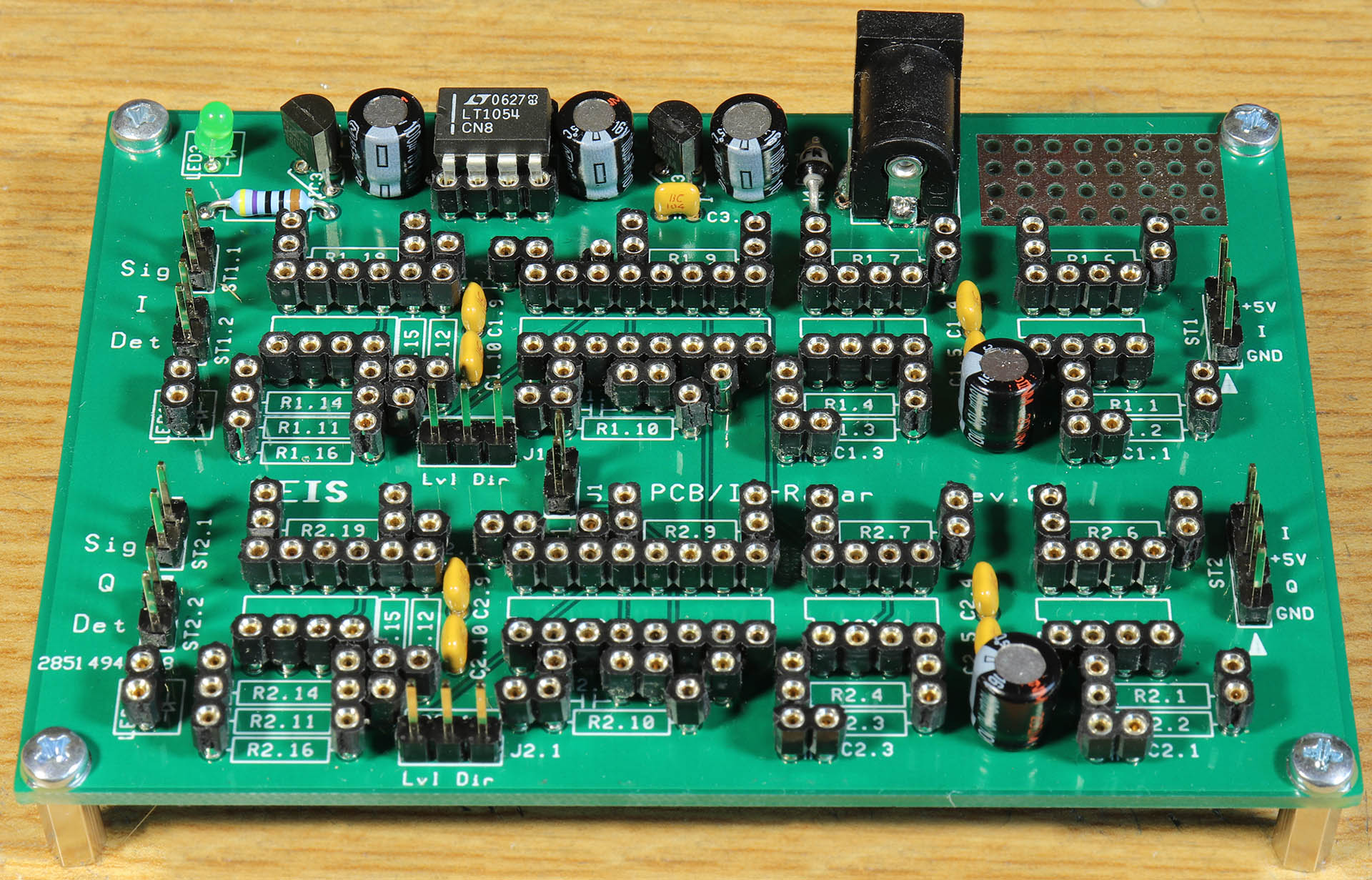
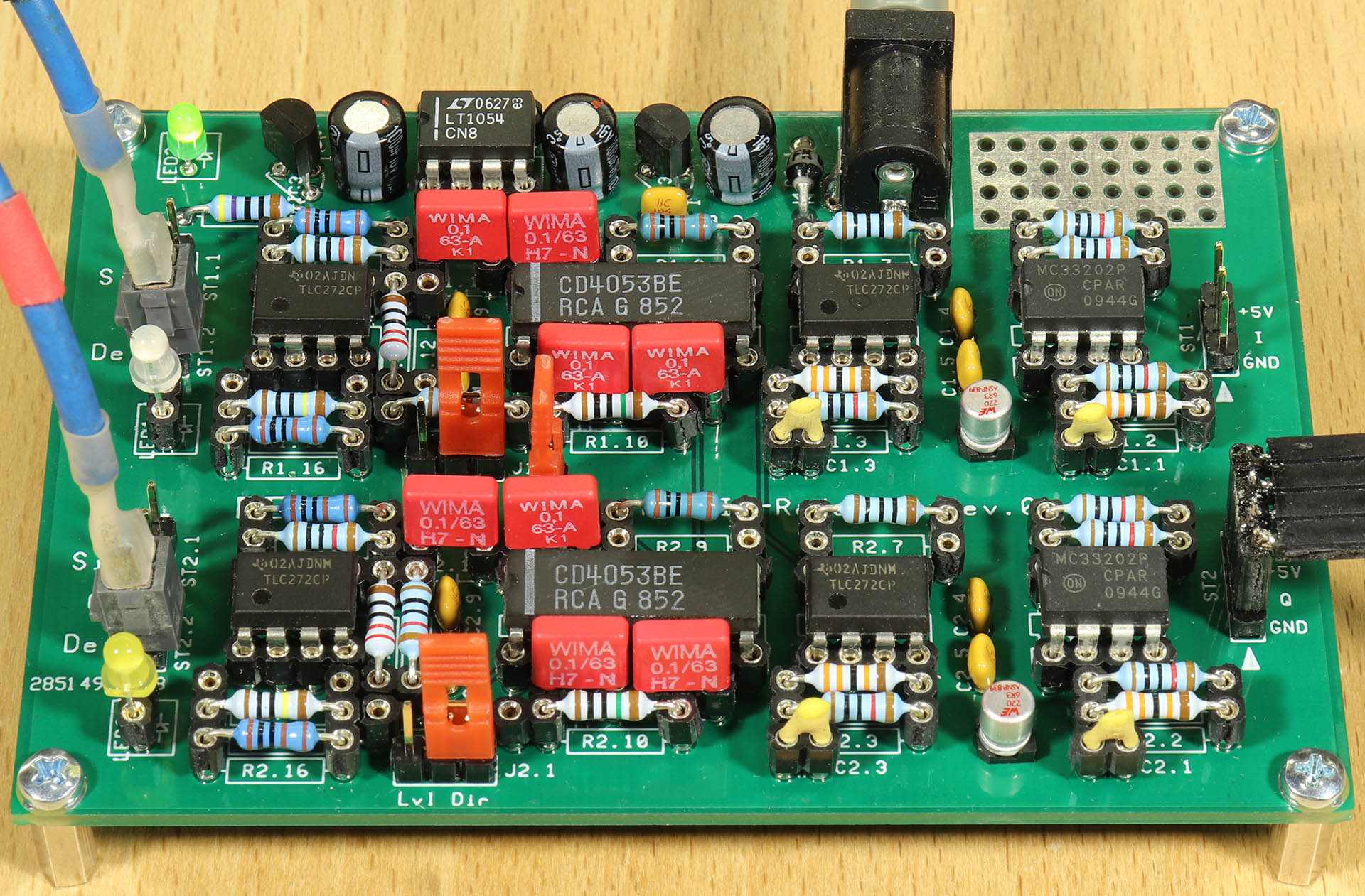
Ansonsten war das Layout fehlerfrei (ungewöhnlich...), allerdings würde ich jetzt vielleicht noch eine 4-polige Stiftleiste incl. den notwendigen Bauteilen hinzufügen, um einen µC zur digitalen Auswertung direkt anschließen zu können, oder vielleicht auch einen Schaltausgang für externe Signalgeber. Ein bisschen Platz ist ja auch noch in dem Lochraster-Bereich. Aber ich habe eigentlich keine weiteren Pläne für dieses Projekt.
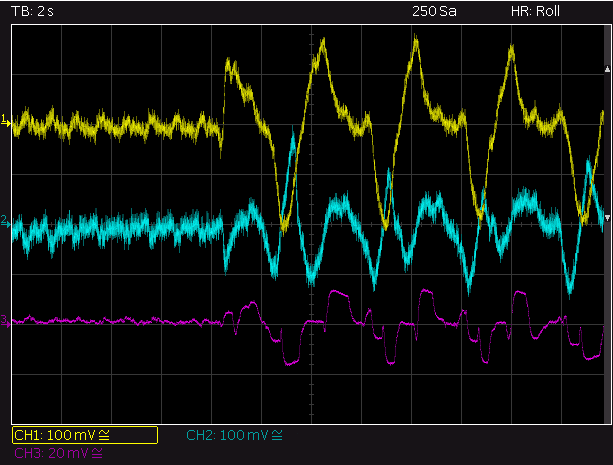
Die Bilder zeigen, von oben nach unten, die Signale I, Q und Direction von der Richtungsauswertung. Beide Aufnahmen wurden aus ca. 2 m Entfernung zu mir, sitzend auf dem Bürostuhl, als "Objekt" für die Bewegung gemacht.
Für das erste Bild habe ich zuerst ganz still gesessen und die Luft angehalten. Wie beim Screenshot weiter oben ist der Herzschlag zu erkennen. Danach habe ich normal geatmet. Bei so kleinen Bewegungen kann die Bewegungsrichtung kaum erkannt werden, aber dennoch: Man erkennt, dass sich das Richtungssignal nur wenig öfter als vielleicht 1-mal pro Sekunde ändert. Das ist kein Wunder: Bei einer Dauer eines Atemzyklus von ca. 4 Sekunden gibt es auch nur insgesamt 4 0-Durchgänge der I- und Q-Signale, bei denen die Richtungsauswertung erfolgt. Dass die Signale weit entfernt von der Idealform sind und auch mehr 0-Durchgänge ergeben, ändert wenig daran, dass das Ergebnis durchaus sinnvoll ist.
Bei dem zweiten Bild habe ich sitzend auf dem Stuhl mit dem Oberkörper erst schnell und mit großer Amplitude vor und zurück geschaukelt, dann langsam mit geringer Amplitude. Die Schaukelfrequenz ist in beiden Fällen ungefähr gleich, nur die Bewegungsgeschwindigkeit ist unterschiedlich. Man sieht im I und Q-Signal, dass mehrere Überlagerungsphasen wegen der größeren Strecke durchlaufen werden, während es bei der geringen Amplitude kaum mehr als eine ist. Die Richtung wird dennoch korrekt erkannt.
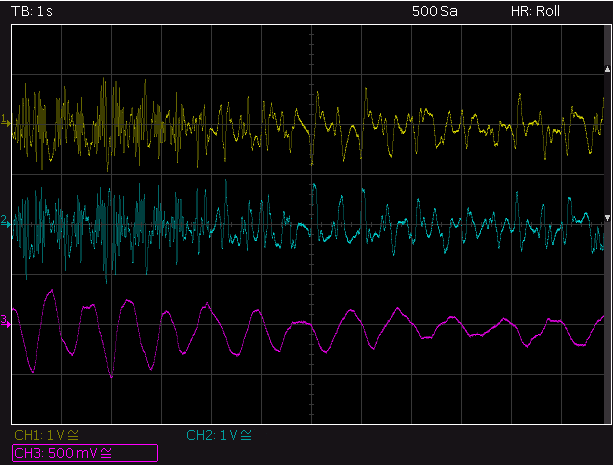
Hier entstand das erste Bild durch einen in ca. 5 m Entfernung vorbeifahrenden PKW, wobei der Sensor in meinem Zimmer direkt hinter dem Kunsstoffrahmen des Fensters angeordnet war. Die Geschwindigkeit ist abnehmend von geschätzt 20 auf 5 km/h. Die Signale sind schwach, nicht viel stärker als das Rauschen, aber die Richtungserkennung liefert trotzdem ein relativ deutliches Signal: Erst nähert sich das Auto schnell und entfernt sich danach langsamer.
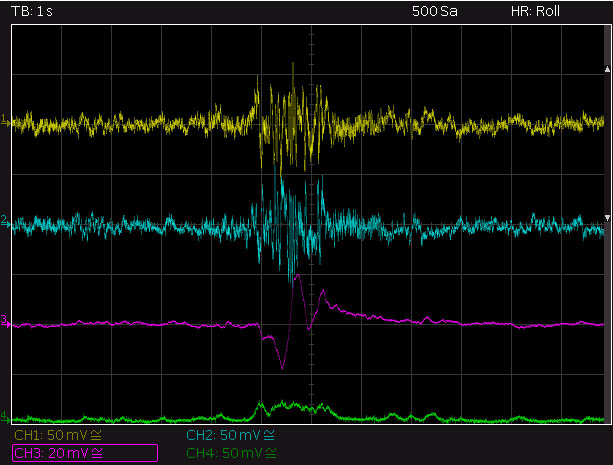
Das zweite Bild zeigt eine ähnliche Situation, nur das Fahrzeug ist viel größer, vergleichbar mit einem großen Van. Das Fahrzeug bremste blieb nur wenige Meter nach der Vobeifahrt, also noch im Erfassungsbereich des Sensors, stehen. Die Richtungserkennung ist eindeutig, nur den Einbruch nach dem 1. positiven Maximum kann ich nicht erklären. Ein Video dazu wäre hilfreich gewesen. Zu beachten ist, dass die Skalierung hier 20 statt vorher 10 mV/Skt ist. Das 4. Signal zeigt den Pegel des I-Signals (I_Lvl).
| Letzte Aktualisierung: 9. Februar 2022 | Fragen? Anregungen? Schreiben Sie mir eine E-Mail! | Uwe Beis |